- Automotive Software Solutions
- |
- 전자제어 장치(ECU) 소프트웨어와..
- |
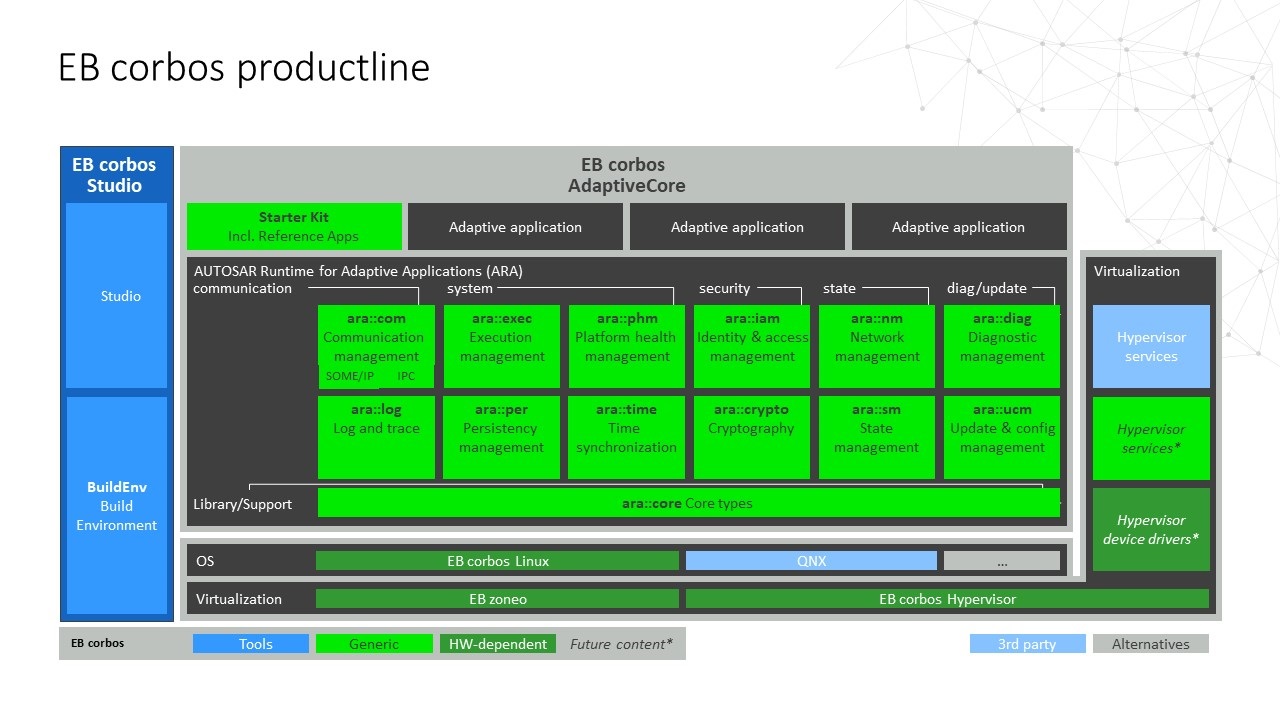
- EB corbos 제품군
- |
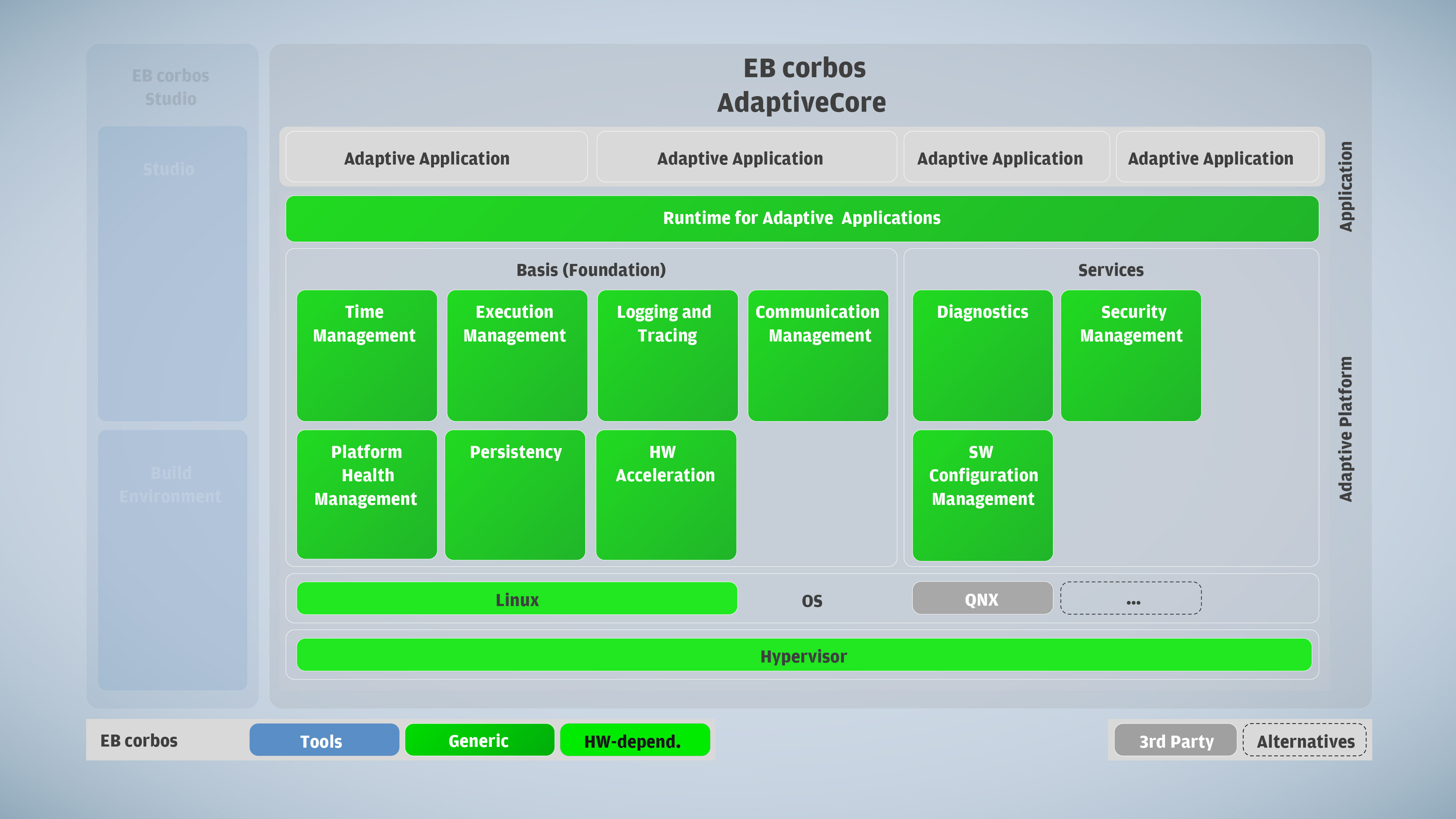
- EB corbos AdaptiveCore
Adaptive AUTOSAR 미들웨어
EB corbos AdaptiveCore
믿을 수 있는 소프트웨어
EB corbos AdaptiveCore는 안전하고 보안으로 보호된 고성능 컨트롤러(HPC)를 위한 소프트웨어 기반입니다. 업계의 새로운 AUTOSAR Adaptive Platform에 맞게 종합적 소프트웨어 프레임워크를 제공합니다.
각 사용 사례에 맞는 완전한 AUTOSAR 지원
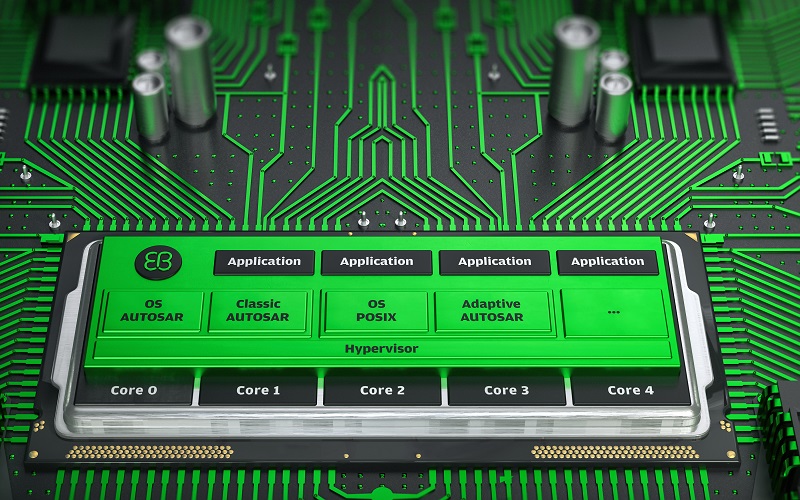
EB corbos AdaptiveCore는 최신 AUTOSAR Adaptive Platform 기반이며, 자동차 이더넷을 지원합니다. AdaptiveCore 플랫폼은 POSIX 기반 운영 체제와 호환되고, 인포테인먼트에서 자율 주행 응용 프로그램까지 유연한 사용을 위하여 설계되었습니다.
커넥티드 및 주행 애플리케이션의 쉬운 통합
EB corbos AdaptiveCore는 AUTOSAR Adaptive Platform 방식을 따르기 위해 응용 프로그램 통합을 위한 표준화된 프로세스를 지원합니다.
무선 소프트웨어 업데이트(OTA)로 빠르고 안전하게 기능 추가
EB corbos AdaptiveCore와 함께 제공되는 소프트웨어 프레임워크는무선 업데이트(OTA)를 위해 필요한 런타임환경에서 소프트웨어를 다시 불러오고 확장하는 기능을 제공합니다.
철저한 안전 수준
일렉트로비트가 제공하는 EB corbos 제품과 안전 제품을 결합하면 성능 시스템에서 최고 수준의 자동차의 안전 수준을 충족할 수 있습니다.
개발 시간 및 비용 절감
일렉트로비트는 인텔, 엔비디아, NXP, 르네사스 등 주요 반도체 공급업체와 장기적인 관계를 유지하고 긴밀하게 협업하고 있습니다. EB corbos 제품은 이 회사들의 플랫폼에서 사용 가능하고, 양산 단계 품질을 위한 시스템 테스트를 포함합니다.
Adaptive AUTOSAR 미들웨어의 기능
- AUTOSAR Adaptive Platform에 따른 표준화된 애플리케이션 인터페이스
- SOME/IP를 통한 실시간, 서비스 지향 통신
- Classic AUTOSAR및 보안을 위한 일렉트로비트 제품과의 상호 운용성
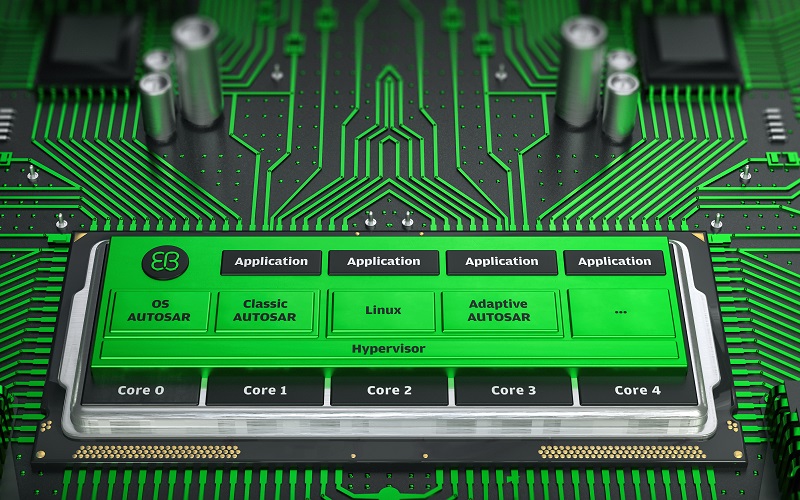
- POSIX 기반 운영 체제(예,: Linux, QNX)를 위한 다중 OS 지원
- 다양한 하드웨어 플랫폼(예: , NXP, 엔비디아, 르네사스, TI)에서 사용 가능
- 장기 유지관리 및 사이버 보안(UNECE R155) 관리
EB corbos AdaptiveCore 옵션을 선택하고 최신 상태로 유지해 보세요.
라이선스
EB corbos AdaptiveCore 2(리눅스)
리눅스용 AUTOSAR Adaptive Platform Functional Clusters
AUTOSAR Adaptive Platform 사양 R19-03 및 R20-11 지원
사용 가능한 다양한 라이센스 유형:
- 컨셉 라이선스
- 프로젝트 라이선스
- 로열티 기반 라이선스
자세한 내용은 일렉트로비트에 문의주세요.
EB corbos AdaptiveCore 2(QNX)
QNX를 위한 AUTOSAR Adaptive Platform Functional Clusters
AUTOSAR Adaptive Platform 사양 R19-03 및 R20-11 지원
사용 가능한 다양한 라이센스 유형:
- 컨셉 라이선스
- 프로젝트 라이선스
- 로열티 기반 라이선스
자세한 내용은 일렉트로비트에 문의주세요.
EB corbos Studio
AUTOSAR Adaptive Platform용 애플리케이션 개발 및 EB corbos AdaptiveCore 2를 실행하는 ECU에서의 애플리케이션 통합을 위한 도구
사용 가능한 다양한 라이센스 유형:
- 단일 사용자 라이센스
- 플로팅 라이선스
- 구독형
자세한 내용은 일렉트로비트에 문의주세요.
EB corbos 2 StarterKit
AUTOSAR Adaptive Platform에 따라 애플리케이션을 개발하기 위한 완전히 통합된 개발 환경입니다.
애플리케이션 예제를 포함하여 EB corbos Studio, EB corbos AdaptiveCore 2 및 (선택 사항) EB corbos Linux를 번들로 제공합니다.
사용 가능한 다양한 라이센스 유형:
- QEMU용 리눅스 기반
- QEMU용 QNX 기반
- 선택된 SoC를 위한 리눅스 기반
- 선택된 SoC를 위한 QNX 기반
자세한 내용은 일렉트로비트에 문의주세요.
Product release 2.13.0
EB corbos AdaptiveCore 2.13.0이 배포되었습니다.
BUILDENV:
- EB corbos AdaptiveCore에 대한 구성 가능한 배포가 Linux 및 QNX 모두에서 사용하도록 설정되었습니다.
- EB corbos AdaptiveCore 제너레이터는 이제 Java 11.0을 사용합니다.
COM:
- AUTOSAR R20-11 API 기능인 ResolveInstanceIDs 및 OfferService에 대한 오류 처리가 구현되었습니다.
- SOME/IP 역직렬화에서 구조체 멤버 및 메서드 인수 재배열에 대한 지원이 구현되었습니다.
CRYPTO:
- 암호화 개체 컨테이너를 생성하기 위한 일렉트로비트 도구가 도입되었습니다.
- 또한 AUTOSAR R20-11에 따라 Crypto 모듈에 다음이 구현되었습니다.
- AUTOSAR GetPrototypedProps
- AUTOSAR save 및 clear 메서드
- AUTOSAR 키 생성
- AUTOSAR 키 합의
EM:
- EM 데몬은 하나의 프로세스에 대해 여러 StateDependentStartupConfig를 지원합니다.
- StateClient API는 AUTOSAR R20-11을 준수합니다.
UCM:
- UCM은 클러스터 스키마 버전 2.0을 지원합니다.
- AUTCM 요청 처리가 AUTOSAR R20-11에 도입되었습니다:
- Cleanup 요청은 PersistencyCleanup 서비스 및 해당 메소드를 사용하여 지속성 관리자로 전송됩니다.
- 업데이트 요청은 UpdateRequests 서비스 및 해당 메서드를 사용하여 State Manager로 전송됩니다.
이 버전은 일렉트로비트 Command 서버에서 사용할 수 있습니다.
Product release 2.14.0
EB corbos AdaptiveCore 2.14.0이 배포되었습니다.
BUILDENV:
- ara-cli에 대한 호스트 빌드 지원을 통해 호스트 도구 체인을 사용하여 EB corbos AdaptiveCore 모듈을 빌드할 수 있습니다. (리눅스 플랫폼의 경우)
- 참조 Yocto 프로젝트에 대한 통합 지원 예시가 구현되었습니다. (리눅스 플랫폼의 경우)
COM:
- AUTOSAR R20-11 API의 기본 오류 처리는 이제 언어 바인딩과 관련된 오류 코드를 지원합니다.
- 기존 기능에 대한 새로운 AUTOSAR R20-11 검증 제약 조건이 추가되었습니다.
- 새로운 동적 링커 스크립트는 공유 라이브러리 바이너리의 바이너리 크기를 최적화합니다.
CRYPTO:
- AUTOSAR R20-11에 따른 기본 해시 기능이 구현되었습니다.
- AUTOSAR R20-11에 따른 VolatileTrustedContainer 기능이 구현되었습니다.
DLT:
- AUTOSAR 20-11의 경우 ara::log는 이제 다음을 지원합니다.
- 모델링된 메시지 API
- DLT ara::로그 매니페스트 파일
- ara::로그 출력 어댑터
DM:
- Latched-WIR에 대한 지원이 추가되었습니다.
- DTC는 오류 감지 카운터 임계값을 향상했습니다.
- 이제 모니터 작업이 서비스 연결이 끊겨도 캐시에 저장됩니다.
- 진단 인터페이스에 대한 재진입 사양을 애플리케이션에서 사용할 수 있습니다.
PM:
- 복구 개념은 보고서 콜백 없이 키 값 저장을 지원합니다.
이 버전은 일렉트로비트 Command 서버에서 사용할 수 있습니다.
Product release 2.15.0
EB corbos AdaptiveCore 2.15.0이 배포되었습니다.
BUILDENV:
- Crypto 모듈은 EB corbos AdaptiveCore의 기본 빌드 구성에서 제거되었으며 이제 추가로 구성 가능한 기능입니다.
COM:
- ara::com은 이제 로컬 시스템에서 제공되는 서비스의 고유성을 확인합니다.
- 일렉트로비트 전용 확장자 ara::com은 새로운 kEventDirectCallOpt 메소드 호출 처리 모드를 제공합니다. kEventDirectCallOpt는 프로세스 내 통신에서 kEvent 메서드 호출에 대한 컨텍스트 전환을 일반 메서드 호출로 줄입니다.
- AUTOSAR R20-11의 경우 AraComBindingGenerator.araexec은 AUTOSAR_PRS_E2EP 프로토콜 사양에서 선택한 제약 조건을 검증합니다.
- 코드 크기 최적화: 서비스 요소 템플릿에서 thick 템플릿 사용으로 인해 발생하는 심각한 코드 블로트(bloat)를 개선하여 서비스 인터페이스 공유 라이브러리의 크기를 줄였습니다.
DM:
- DM 모듈은 DoIP 메시지에서 제조업체별 페이로드 유형의 해석을 지원합니다. 사용자 정의 페이로드는 DM 구성에서 구성되어야 합니다. 이는 AUTOSAR 기능이 아니라 사용자 정의 기능입니다.
IAM:
- IAM 모듈은 이제 안드로이드 플랫폼을 지원합니다. 안드로이드 사용자는 서비스 제공 및 검색 중에 애플리케이션의 ID 및 액세스 관리를 위해 IAM 모듈의 기능을 사용할 수 있습니다.
PM:
- 연결하는 애플리케이션의 UID와 제한 정보를 갖기 위해 애플리케이션별 제한 구성의 이름이 application_id_amd.json으로 변경되었습니다.
- AUTOSAR R20-11의 경우 복구 개념은 복구 보고서 콜백을 통해 KVS(Key-Value Storage)를 지원합니다. 복구 보고서 콜백은 먼저 복구된 키에 대해 트리거된 다음 실패한 키에 대해 트리거됩니다. 복구된 키와 실패한 키가 모두 있는 경우 두 번 트리거됩니다.
UCM:
- AUTOSAR R20-11의 경우: UCM이 kIdle 또는 kReady 상태인 경우 데이터 전송이 계속 진행되는 동안 ProcessSwPackage 메서드를 호출하여 소프트웨어 패키지를 처리할 수 있습니다.
EB corbos Studio:
- EB corbos Studio를 사용하면 사용자 인터페이스에서 .pluget/.araexec가 실행될 때 더 이상 사용되지 않는 생성 파일을 자동으로 삭제할 수 있습니다.
- 마스터 작업은 명령어에서 RunProjectImporter 옵션을 지원합니다. 이 옵션을 사용하면 하나 이상의 프로젝트를 가져오고 동일한 명령으로 다른 작업을 실행할 수 있습니다.
이 버전은 일렉트로비트 Command 서버에서 사용할 수 있습니다.
일렉트로비트의 Adaptive AUTOSAR 미들웨어