- ADAS and automated..
- |
- Environmental model
차량 환경 모델
자율 주행을 위한 소프트웨어 모듈
센서 데이터 퓨전을 이용한 차량 주변 포괄적 관찰
차선 유지와 자율 주행 등 주행 기능과 그에 대한 지원을 제공하기 위해서는 차량의 정적, 동적 환경에 대한 정확한 정보가 필요합니다. 이때 센서 데이터 퓨전을 이용하면 다른 차량의 움직임에 대한 정보, 정적인 환경, 도로, 교통법에 대한 정보를 전달 받을 수 있습니다. EB는 구매 즉시 사용 가능한 맞춤형 소프트웨어 모듈을 제공해 적은 비용으로도 쉽게 주행 기능을 개발할 수 있도록 도와드립니다.
장점
주행 기능 조력자
검증된 소프트웨어 모듈은 기능 개발의 유리한 시작을 선점할 수 있는 초석입니다.
시간과 비용의 가치 있는 절약
자율 주행 시스템 부분을 차별화하는 데 초점을 맞추어 시장 출시 기간을 단축할 수 있습니다.
특별한 기능을 위한 기틀 마련
사전 지식 없이 사용 및 설정 가능한 하드웨어 애그노스틱 모듈로 다른 차량 플랫폼으로의 이동이 쉬워집니다.
바로 사용 가능한 모듈과 EB의 우수한 엔지니어링 기술로 귀사의 환경 모델을 만들어 보세요.
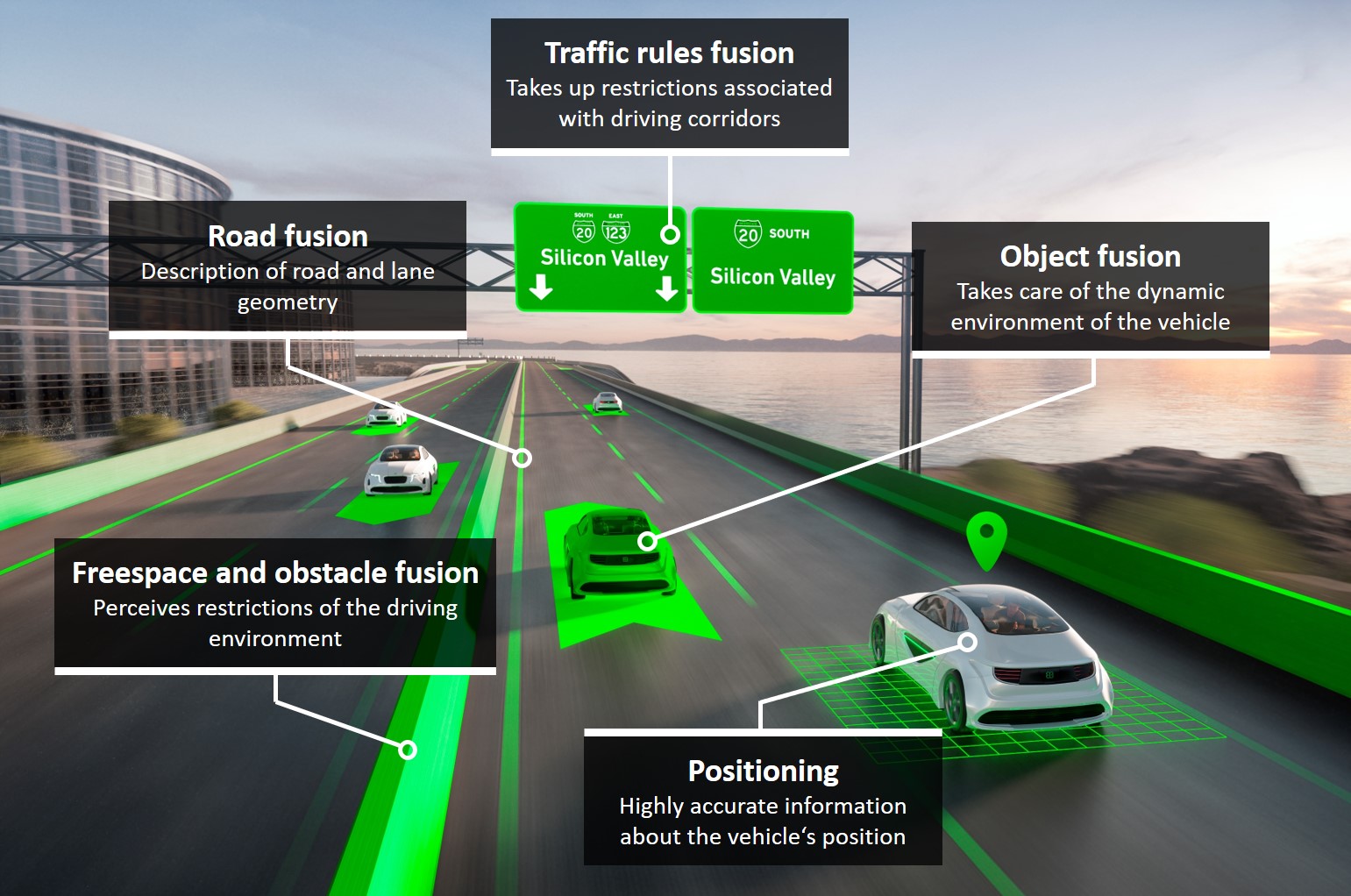
EB가 제공하는 모듈
- 교통법 퓨전 – 고속도로 주행 시 제한 사항을 전달합니다.
- 도로 퓨전 – 길과 도로의 구조를 묘사합니다.
- 물체 퓨전 – 차량의 정적인 환경과 동적인 환경을 인식합니다.
- 여유 공간과 장애물 퓨전 – 주행 환경의 제한을 감지합니다.
- 포지셔닝 – 고도로 정확한 차량의 위치 정보를 제공합니다.
주요 특징
- 사전 지식 없이도 사용 가능한 하드웨어 및 센서 애그노스틱으로, 다양한 플랫폼에 적용 가능
- 기능 개발자를 위한 깔끔하고 간단한 API
- 기존 및 신규 주행 시스템 통합 가능, 고객 개발 기능 일부로도 통합 가능
- 완전한 환경 모델의 개별 라이브러리 전달 가능
EB의 소프트웨어 엔지니어링 서비스에 대한 상세 정보
Brochure
Category:Automated Driving, Software Engineering
Product/s:EB Assist, EB robinos, Software engineering
Category:Automated Driving
Product/s:EB robinos

Category:Automated Driving
Product/s:EB Assist

Category:Automated Driving
Product/s:EB robinos
White paper

Category:Automated Driving
Product/s:EB Assist
Category:Automated Driving, Connected Car
Product/s:Software engineering

