- サービス
- |
- ソフトウェアエンジニアリングサービス
- |
- ADAS and automated..
- |
- Environmental model
車両環境モデル
自動運転向けのソフトウェアモジュール
センサーデータフュージョンで車両周囲の360度ビューを生成
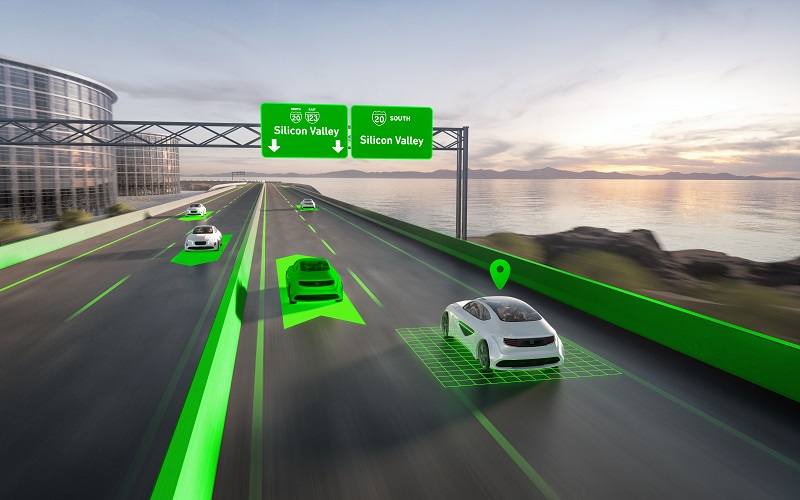
車線維持から完全自動運転まで、自動運転機能には車両周辺の静的および動的環境に関する正確な情報が必要です。センサーデータを統合することにより、他の交通利用者や静的環境、道路、交通ルールに関する情報が得られます。エレクトロビットは、お客様が工数とコストを抑えて運転機能を容易に開発できるよう、すぐに導入可能なカスタムソフトウェアモジュールを提供しています。
メリット
運転支援機能の開発をサポート
実績あるソフトウェアモジュールは、他社に先駆けて機能の開発できるようにサポートします。
製品化までの時間短縮とコストを削減
自動運転システムを差別化する技術の開発に専念し、量産化までの期間を短縮することができます。
独自機能への道を拓く
ハードウェアに依存せず、設定変更可能なモジュールにより、さまざまな車両プラットフォームへの移行が簡単にできます。
すぐに使えるモジュールで環境モデルを生成、優れたエンジニアリングのメリットを享受
エレクトロビットが提供するモ
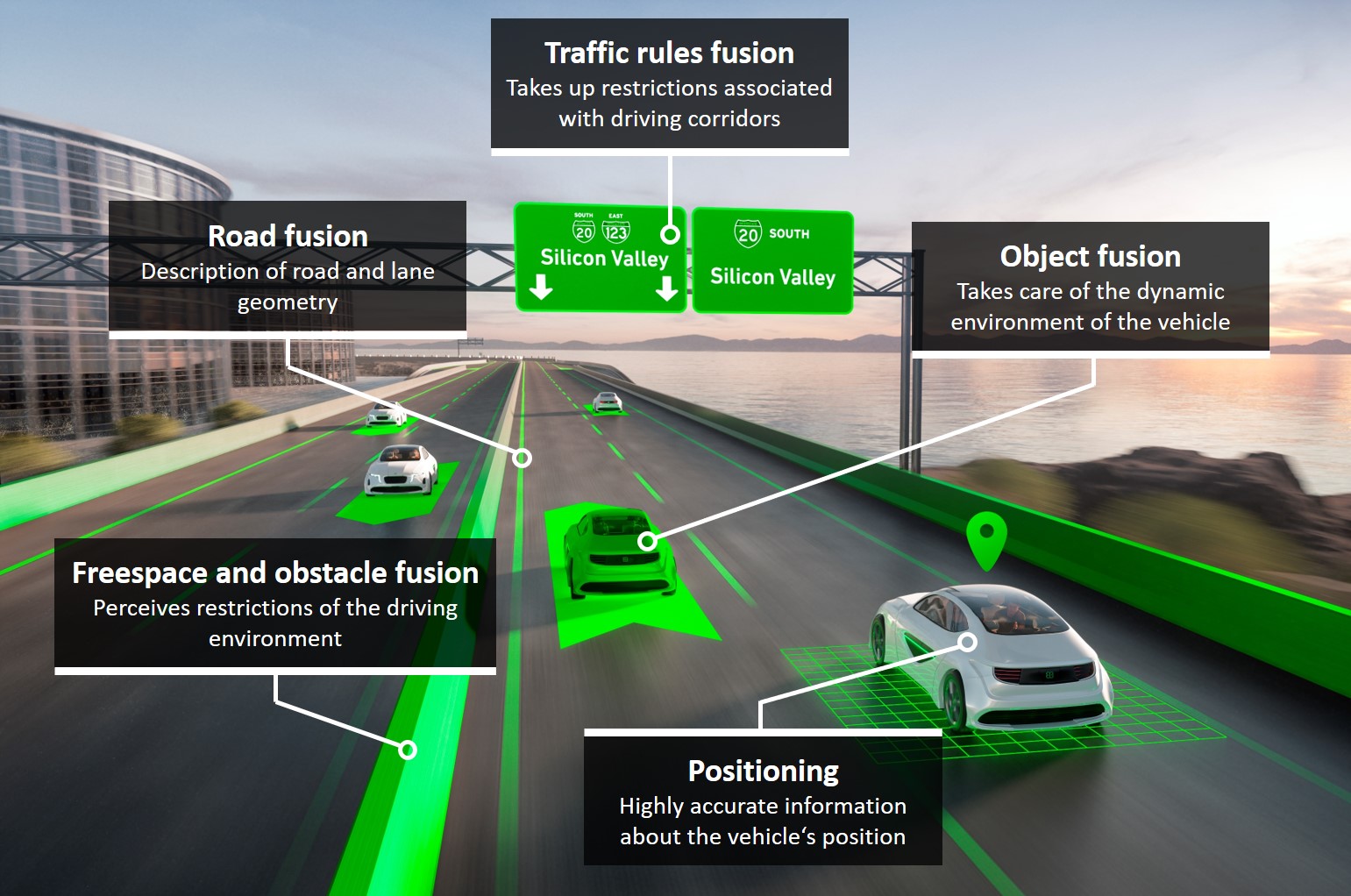
- 交通ルールの統合 – 運転経路の関連規制を取得
- 道路状況の統合 – 道路と車線形状の情報
- オブジェクトの統合-車両周辺の静的および動的環境を認識
- フリースペースおよび障害物の統合 – 運転環境の制約を認識
- 位置測定 –非常に正確な車両位置情報
主要な機能
- ハードウェアとセンサーに依存せず、複数のプラットフォームで利用可能
- 明確で使いやすいAPI
- 既存・新規の運転システムに、または開発機能の一部として統合可能
- 完全な環境モデルの個別ライブラリとして提供可能
エレクトロビットのソフトウェアエンジニアリングサービスの詳細
Brochure
Category:Automated Driving, Software Engineering
Product/s:EB Assist, EB robinos, Software engineering
Category:Automated Driving
Product/s:EB robinos

Category:Automated Driving
Product/s:EB Assist

Category:Automated Driving
Product/s:EB robinos
White paper

Category:Automated Driving
Product/s:EB Assist
Category:Automated Driving, Connected Car
Product/s:Software engineering

